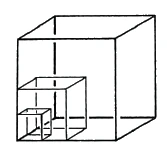
Last time we attempted to visualize a four-dimensional spatial figure by reducing it to three dimensions. First we converted a three-dimensional figure into a two-dimensional one. We substituted colors for dimensions, constructing our image using three colors to represent the three dimensions of a cube. Then we unfolded the cube so that all of its surfaces lay in a plane, resulting in six squares whose differently colored edges represented the three dimensions in two-dimensional space.
We then envisioned transferring each square of the cube's surface into the third dimension as moving the square through a colored fog and allowing it to reappear on the other side. We imagined all the surface squares moving through and being tinted by transition squares. Thus, we used colors to attempt to picture a three-dimensional cube in two dimensions. To represent squares in one dimension, we used two different colors for their edge pairs,—to represent a cube in two dimensions, we used three colors. Depicting a four-dimensional figure in three-dimensional space required a fourth color.
Then we imagined a cube with three different surface colors as analogous to our square with two different edge colors. Each such cube moved through a cube of the fourth color,—that is, it disappeared into the fourth dimension or color. In accordance with Hinton's analogy, we made each boundary cube move through the new fourth color and reappear on the other side in its own original color.
Figure 31
Now I would like to give you another analogy. We will begin once again by reducing three dimensions to two in preparation for reducing four dimensions to three. We must envision constructing our cube out of its six square sides, but instead of leaving all six squares attached when we spread them out, we will arrange them differently, as shown here (Figure 31). As you see, we have split the cube into two groups of three squares each. Both groups lie in the same plane. We must understand the location of each group when we reassemble the cube. To complete the cube, I must place one group above the other so that square 6 lies over square 5. Once square 5 is in position, I must fold squares 1 and 2 upward, while squares 3 and 4 must be folded downward (Figure 32). The corresponding pairs of line segments—that is, the ones of the same color (here, with the same number and weight of slashes as shown in Figure 31)—will then coincide. These lines that are spread out in two-dimensional space coincide when we make the transition to three-dimensional space.
Figure 32
A square consists of four edges, a cube of six squares, and a four-dimensional figure of eight cubes. [Note 36] Hinton calls this four-dimensional figure a tessaract. Our task is not simply to put these eight cubes together into a single cube, but to do so by making each one pass through the fourth dimension. When I do to a tessaract what I just did to a cube, I must observe the same law. We must use the analogy of the relationship of a three-dimensional figure to its two-dimensional counterpart to discover the relationship of a four-dimensional figure to its three-dimensional counterpart. In the case of an unfolded cube, I had two groups of three squares. Similarly, unfolding a four-dimensional tessaract in three-dimensional space results in two groups of four cubes, which look like this (Figure 33). This eight-cube method is very ingenious.
Figure 33
We must handle these four cubes in three-dimensional space exactly as we handled the squares in two-dimensional space. Look closely at what I have done here. Unfolding a cube so that it lies flat in two-dimensional space results in a grouping of six squares. Performing the corresponding operation on a tessaract results in a system of eight cubes (Figure 34). We have transferred our reflections on three-dimensional space to four-dimensional space. Folding up the squares and making their edges coincide in three-dimensional space corresponds to folding up the cubes and making their surfaces coincide in four-dimensional space. Laying the cube flat in two-dimensional space resulted in corresponding lines that coincided when we reconstructed the cube. Something similar happens to the surfaces of individual cubes in the tessaract. Laying out a tessaract in three-dimensional space results in corresponding surfaces that will later coincide. Thus, in a tessaract, the upper horizontal surface of cube 1 lies in the same plane as the front surface of cube 5 when we move into the fourth dimension.
Figure 34
Similarly, the right surface of cube 1 coincides with the front surface of cube 4, the left square in cube 1 coincides with the front square in cube 3, and the lower square in cube 1 coincides with the front square in cube 6. Similar correspondences exist between the remaining surfaces. When the operation is completed, the cube that remains is cube 7, the interior cube that was surrounded by the other six. [Note 37]
As you see, we are concerned once more with finding analogies between the third and fourth dimensions. As we saw in one of the illustrations from the last lecture (Figure 29), just as a fifth square surrounded by four others remains invisible to any being who can see only in two dimensions, the same applies to the seventh cube in this instance. It remains hidden from three-dimensional vision. In a tessaract, this seventh cube corresponds to an eighth cube, its counterpart in the fourth dimension.
All of these analogies serve to prepare us for the fourth dimension, since nothing in our ordinary view of space forces us to add other dimensions to the three familiar ones. Following Hinton's example, we might also use colors here and think of cubes put together so that the corresponding colors coincide. Other than through such analogies, it is almost impossible to give any guidance in how to conceive of a four-dimensional figure.
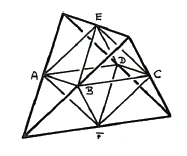
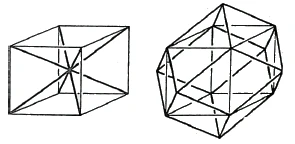
I would now like to talk about another way of representing four-dimensional bodies in three-dimensional space that may make it easier for you to understand what is actually at issue. Here we have an octahedron, which has eight triangular surfaces that meet in obtuse angles (Figure 35).
Figure 35
Please imagine this figure and then follow this train of thought with me. You see, these edges are where two surfaces intersect. Two intersect at \(AB\), for example, and two at \(EB\). The only difference between an octahedron and a cube is the angle at which the surfaces intersect. Whenever surfaces intersect at right angles, as they do in a cube, the figure that is formed must be a cube. But when they intersect at an obtuse angle, as they do here, an octahedron is formed. By making the surfaces intersect at different angles, we construct different geometric figures. [Note 38]
Figure 36
Next, envision a different way of making the surfaces of an octahedron intersect. Picture that one of these surfaces here, such as \(AEB\), is extended on all sides and that the lower surface, \(BCE\), and the surfaces \(ADF\) and \(EDC\), at the back of the figure, are similarly extended. These extended surfaces must also intersect. There is a two-fold symmetry at this line of reflection also called "half-turn symmetry." When these surfaces are extended, the other four original surfaces of the octahedron, \(ABF\), \(EBC\), \(EAD\), and \(DCF\), are eliminated. Out of eight original surfaces, four remain, and these four form a tetrahedron, which also can be called half an octahedron because it causes half of the surfaces of the octahedron to intersect. It is not half an octahedron in the sense of cutting the octahedron in half in the middle. When the other four surfaces of the octahedron are extended until they intersect, they also form a tetrahedron. The original octahedron is the intersection of these two tetrahedrons. In stereometry or geometric crystallography, what is called half a figure is the result of halving the number of surfaces rather than of dividing the original figure in two. This is very easy to visualize in the case of an octahedron. [Note 39] If you imagine a cubed halved in the same way, by making one surface intersect with another surface, you will always get a cube. Half of a cube is always another cube. There is an important conclusion to be drawn from this phenomenon, but first I would like to use another example. [Note 40]
Figure 37
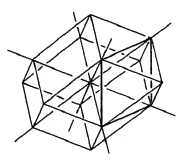
Here we have a rhombic dodecahedron (Figure 37). As you see, its surfaces meet at specific angles. Here we also have a system of four wires—I will call them axial wires—that run in different directions, that is, they are diagonals connecting specific opposite corners of the rhombic dodecahedron. These wires represent the system of axes in the rhombic dodecahedron, similar to the system of axes you can imagine in a cube. [Note 41]
In a system of three perpendicular axes, a cube results when stoppage occurs in each of these axes, producing intersecting surfaces. Causing the axes to intersect at different angles results in different geometric solids. The axes of a rhombic dodecahedron, for example, intersect at angles that are not right angles. Halving a cube results in a cube. [Note 42] This is true only of a cube. When the number of surfaces in a rhombic dodecahedron is halved, a totally different geometric figure results. [Note 43]
Figure 38
Now let's consider how an octahedron relates to a tetrahedron. Let me show you what I mean. The relationship is clearly apparent if we gradually transform a tetrahedron into an octahedron. For this purpose, let's take a tetrahedron and cut off its vertices, as shown here (Figure 38). We continue to cut off larger portions until the cut surfaces meet on the edges of the tetrahedron. The form that remains is an octahedron. By cutting off the vertices at the appropriate angle, we have transformed a spatial figure bounded by four planes into an eight-sided figure.
Figure 39
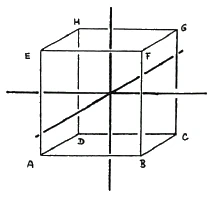
What I have just done to a tetrahedron cannot be done to a cube. [Note 44] A cube is unique in that it is the counterpart of three-dimensional space. Imagine that all the space in the universe is structured by three axes that are perpendicular to each other. Inserting planes perpendicular to these three axes always produces a cube (Figure 39). Thus, whenever we use the term cube to mean a theoretical cube rather than a specific one, we are talking about the cube as the counterpart of three-dimensional space. Just as the tetrahedron can be shown to be the counterpart of an octahedron by extending half of the octahedrons sides until they intersect, an individual cube is also the counterpart of all of space. [Note 45] If you imagine all of space as positive, the cube is negative. The cube is the polar opposite of space in its entirety. The physical cube is the geometric figure that actually corresponds to all of space.
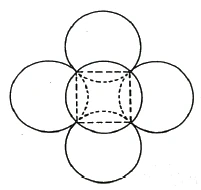
Suppose that instead of a three-dimensional space bounded by two-dimensional planes, we have a space bounded by six spheres, which are three-dimensional figures. I start by defining a two-dimensional space with four intersecting circles, i.e., two-dimensional figures. Now imagine these circles growing bigger and bigger,—that is, the radius grows ever longer and the midpoint becomes increasingly distant. With time, the circles will be transformed into straight lines (Figure 40). Then, instead of four circles, we have four intersecting straight lines and a square.
Figure 40
Now instead of circles, imagine six spheres, forming a mulberry- like shape (Figure 41). Picture the spheres growing ever larger, just as the circles did. Ultimately, these spheres will become the planes defining a cube, just as the circles became the lines defining a square. This cube is the result of six spheres that have become flat. The cube, therefore, is only a special instance of the intersection of six spheres, just as the square is simply a special instance of four intersecting circles.
Figure 41
When you clearly realize that these six spheres flattening into planes correspond to the squares we used earlier to define a cube—that is, when you visualize a spherical figure being transformed into a flat one—the result is the simplest possible three-dimensional figure. A cube can be imagined as the result of flattening six intersecting spheres.
We can say that a point on a circle must pass through the second dimension to get to another point on the circle. But if the circle has become so large that it forms a straight line, any point on the circle can get to any other point by moving only through the first dimension. Let's consider a square that is bounded by two-dimensional figures. As long as the four figures defining a square are circles, they are two-dimensional. Once they become straight lines, however, they are one-dimensional.
The planes defining a cube develop out of three-dimensional figures (spheres) when one dimension is removed from each of the six spheres. These defining surfaces come about by being bent straight, through reducing their dimensions from three to two. They have sacrificed a dimension. They enter the second dimension by sacrificing the dimension of depth. Thus, we could say that each dimension of space comes about by sacrificing the next higher dimension.
If we have a three-dimensional form with two-dimensional boundaries, and so reduce three-dimensional forms to two dimensions, you must conclude from this that, if we consider three-dimensional space, we have to think of each direction as the flattened version of an infinite circle. Then if we move in one direction, we would ultimately return to the same point from the opposite direction. Thus each ordinary dimension of space has come about through the loss of the next higher dimension. A triaxial system is inherent in our three-dimensional space. Each of its three perpendicular axes has sacrificed the next dimension to become straight.
In this way, we achieve three-dimensional space by straightening each of its three axial directions. Reversing the process, each element of space also could be curved again, resulting in this train of thought: When you curve a one-dimensional figure, the resulting figure is two-dimensional. A curved two-dimensional figure becomes three-dimensional. And, finally, curving a three-dimensional figure produces a four-dimensional figure. Thus, four-dimensional space can be imagined as curved three-dimensional space. [Note 46]
At this point, we can make the transition from the dead to the living. In this bending you can find spatial figures that reveal this transition from death to life. At the transition to three-dimensionality, we find a special instance of four-dimensional space,—it has become flat. To human consciousness, death is nothing more than bending three dimensions into four dimensions. With regard to the physical body taken by itself, the opposite is true: death is the flattening of four dimensions into three.
See note 30 from the Fourth Lecture.
The situation described here corresponds to Figure 76 in the case of a cube laid out in a plane:
Figure 76
The location of square 6, directly "above" square 5, cannot be directly depicted in a plane. The upper edge of square 2, the lower edge of square 4, and the right and left edges of squares 3 and 1, respectively, must be seen as identical to the edges of square 6.
Correspondingly, cubes 7 and 8 "coincide" and cannot be distinguished in three-dimensional space by any direct means. The upper and lower surfaces of cubes 5 and 6, respectively, the left and right surfaces of 3 and 4, respectively, and the front and back surfaces of 1 and 2, respectively, also constitute the surfaces of cube 8. Unfolding a cube makes it easier to note the coincidence between the edges of the sixth square and those of its neighboring squares (Figure 77).
Figure 77
Figure 78 shows the corresponding situation in the case of a tessaract. The surfaces of the eighth cube must be seen as identical to the corresponding surfaces of neighboring cubes.
Figure 78
In each of the five regular convex polyhedrons—cube, tetrahedron, octahedron, dodecahedron, and icosahedron—all the angles of surface intersection are equal. The angle of intersection is unique to each regular polyhedron.
The surfaces of any regular polyhedron are polygons that are both similar and regular,—that is, all of their edges are of equal length, and all of their angles are equal. Thus, we simply need to investigate how many polygons can meet at one vertex in order to gain a complete overview of all possible regular polyhedrons. Let's begin with equilateral triangles (Figure 79). Two equilateral triangles cannot be joined together to form one vertex of a polyhedron. Three such triangles yield a tetrahedron, four form one vertex of an octahedron, and five form one vertex of an icosahedron. Six triangles lie flat in a plane and cannot form a vertex.
Figure 79
Three regular rectangular solids (i.e., squares) form one vertex of a cube, while four lie flat in a plane. Three pentagons form one vertex of a dodecahedron, but four pentagons would overlap (Figure 80).
Figure 80
Three hexagons lie flat in a plane, and three heptagons overlap. Thus, there cannot possibly be more than the five types of regular polyhedrons mentioned earlier.
Rudolf Steiner refers here to a standard procedure in geometric crystallography. The seven classes of crystals are based on the symmetries of the seven possible crystallographic systems of axes. A symmetry group, which represents all of the symmetry elements of one class, is called a holohedry. The polyhedrons belonging to such symmetry groups are called holohedral shapes. They are simple polyhedrons that can be converted into each other through symmetrical operations that all belong to a single crystal system. Hemihedral forms are polyhedrons with half as many surfaces as the corresponding holohedral forms. Hemihedrons are derived from holohedrons through the extension of some of the surfaces of the holohedrons and the disappearances of others. The symmetry group of the hemihedrons is correspondingly reduced (subgroup of holohedries of index 2). In this sense, a tetrahedron is a hemihedral variation on an octahedron because it has half the number of surfaces.
Crystallographers also have introduced tetardohedrons, polyhedrons with one-fourth the number of surfaces of the corresponding holohedral figures and a correspondingly reduced symmetry group (subgroup of holohedries of index 4). For more information, see Hochstetter/Bisching [1868], pp. 20ff; Schoute [1905], pp. 190ff; and Niggli [1924], pp. 70ff and 129ff.
In a cube, any two intersecting surfaces meet in a right angle. No matter which surfaces we choose, extending them always will result in a figure with 90° angles of intersection. In a cube, however, reducing the number of surfaces no longer results in a closed polyhedron.
"In this case, the axes of a cube are the three perpendicular directions that intersect in the cube's midpoint,—one pair of surfaces is perpendicular to each axis. These axes are also the axes of the three zones of a cube (Figure 81). A zone or zone association is a set of at least three surfaces that are parallel to the straight line of a zone axis.
Figure 81
A rhombic dodecahedron is easy to construct with the help of a cube. First all six diagonal planes connecting opposite edges of the cube are constructed (Figure 82). Then the mirror images of the resulting six internal pyramids are constructed on the outside of the cube (Figure 83). The four "axes" mentioned in the lecture are the diagonals of the rhombic dodecahedron that coincide with the diagonals of the cube.
Figures 82-83
These four axes are the four zone axes of the rhombic dodecahedron—that is, each of them is parallel to six surfaces of this figure. These four groups of six planes are called the zones of the rhombic dodecahedron.
Because its vertices are not all similar, a rhombic dodecahedron is not a regular polyhedron. Three surfaces intersect in each of the vertices that emerge from the cube, while four surfaces intersect in each of the other vertices. The zone axes pass through the vertex points where three surfaces meet. Note that the "axes" described here represent a specific selection from the seven possible diagonals (straight line segments connecting opposite comer points).
Figure 84
About the drawings: The rhombic dodecahedron, like the other geometric figures depicted here, is drawn in oblique parallel projection, which is best suited to freehand drawing on the board. This projection results in slight distortions of subsequent figures, which must be taken into account.
In addition to the axes described in the previous note, a rhombic dodecahedron also has axes perpendicular to its surfaces. If a rhombic dodecahedron is held in place while its four zone axes are rotated 45° around the perpendicular axis of the underlying cube, the axes then intersect the midpoints of eight of the rhombic dodecahedrons surfaces. The figure formed by these surfaces is an octahedron consisting of the four pairs of surfaces that are perpendicular to the zone axes (rotated 45°) of the rhombic dodecahedron (Figure 85). Adding to these four axes the two horizontal axes (also rotated 45°) of the cube (see previous note) results in a system of six "axes"; each surface of the rhombic dodecahedron is perpendicular to one of them.
Figure 85
Halving the number of surfaces of a cube does not produce any new surface angles. A rhombic dodecahedron can be "halved" in several different ways (Figures 86 and 87). When this operation produces a closed polyhedron, it is an oblique parallelepiped.
Figure 86Figure 87
This statement presupposes that the cuts in the tetrahedron or cube are made parallel to existing surfaces. Successively cutting off the vertices of a cube so that the cut surfaces are perpendicular to the cube's diagonals results first in a cube-octahedron and eventually in an octahedron.
See also Steiner's lecture of March 31, 1905. No matter which three of the six planes defining a cube are selected, the result of extending them into space results in a "figure" that stretches to infinity. If the three surfaces we select are perpendicular to each other, the result is a geometric figure consisting of three perpendicular axes and the planes that connect them in pairs. Such a figure can be seen as representing three-dimensional Euclidean space and is also the geometric basis of every Euclidean or Cartesian coordinate system.
Here and in the remainder of the lectures, Steiners presentation seems to have been substantially abridged, and, as a result, various perspectives overlap.
To the series square-cube-tessaract, we can add another series of geometrical figures where the planes or faces of the figure are curved rather than straight or flat. We can call the figures of this second series curved squares, curved cubes, and curved tessaracts. In such a figure, the elements forming its edges or sides have the same number of dimensions as the total figure.
The circle, the spherical surface (two-dimensional sphere), and the solid (three-dimensional) sphere are topologically equivalent to the rectilinear elements defining the boundaries of a square, a cube, and a tessaract respectively. The disc, ball, and four-dimensional ball are topologically equivalent to the square, the cube, and the tessaract respectively.
On the other hand, suitable bending of a one-dimensional line segment results in a two-dimensional segment of a curve or—in a special instance—in a segment of a circle. Bending a disc produces a three-dimensional figure, a hollow hemisphere. Bending a solid sphere produces a four-dimensional figure (in a special instance, a section of a four-dimensional sphere).
In this way, a circle can be constructed from two curved line segments whose ends are joined. Similarly, in three-dimensional space, a spherical surface can be constructed from two discs that are first curved and then joined at their edges. In four-dimensional space, a three-dimensional sphere results when two curved solid spheres are joined at their surfaces (two-dimensional spheres). This three-dimensional sphere relates to three-dimensional space as a ball (the surface of an ordinary sphere) relates to a plane. [Mathematician David Cooper comments: You are comparing filled-in figures rather than boundaries in both cases. A sphere (the boundary of a ball) is two-dimensional, so the two-dimensional sphere's volume means the (three-dimensional) ball.]
This material is made available through the Rudolf Steiner Archive, rsarchive.org, a project of the community funded nonprofit, Steiner Online Library. Please consider making a tax deductible donation to support our work.